
Welcome to the personal site of Andrii Zadaianchuk, Machine Learninig Researcher.
Welcome to the personal site of Andrii Zadaianchuk, Machine Learninig Researcher.
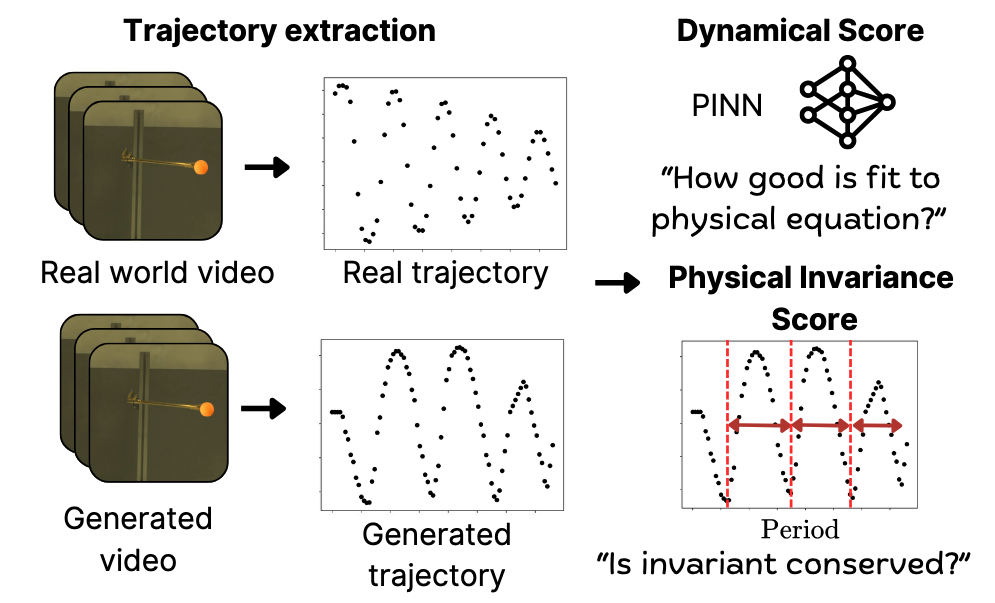
Chenyu Zhang*, Daniil Cherniavskii*, Antonios Tragoudaras*, Antonios Vozikis, Thijmen Nijdam, Derck W. E. Prinzhorn, Mark Bodracska, Nicu Sebe, Andrii Zadaianchuk^, Efstratios Gavves^
arXiv, 2025
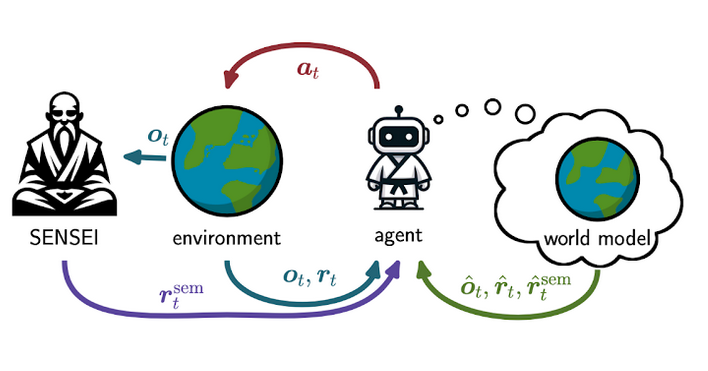
Cansu Sancaktar*, Christian Gumbsch*, Andrii Zadaianchuk, Pavel Kolev, Georg Martius
International Conference on Machine Learning, 2025
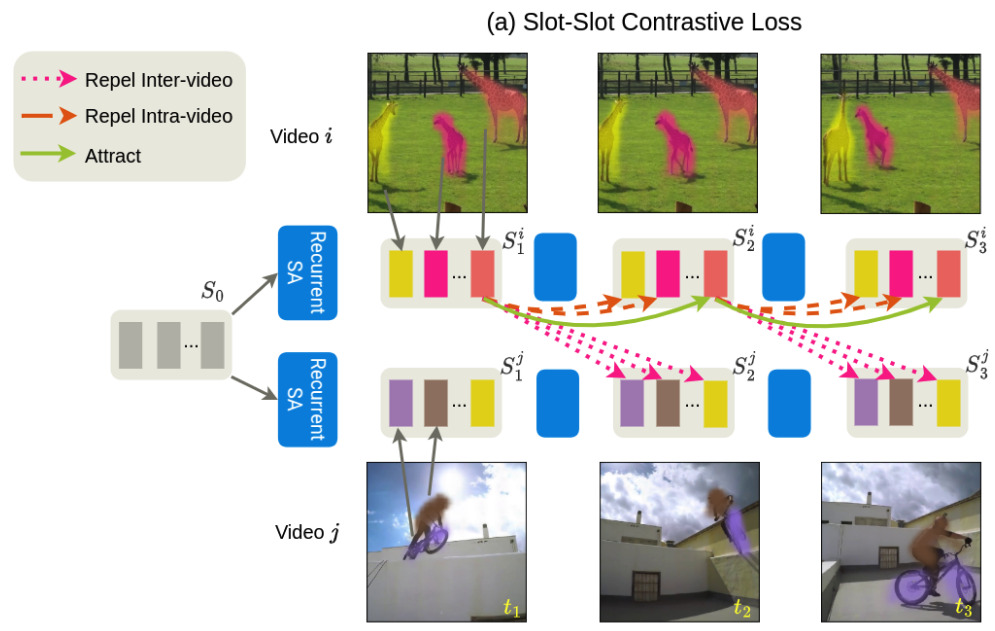
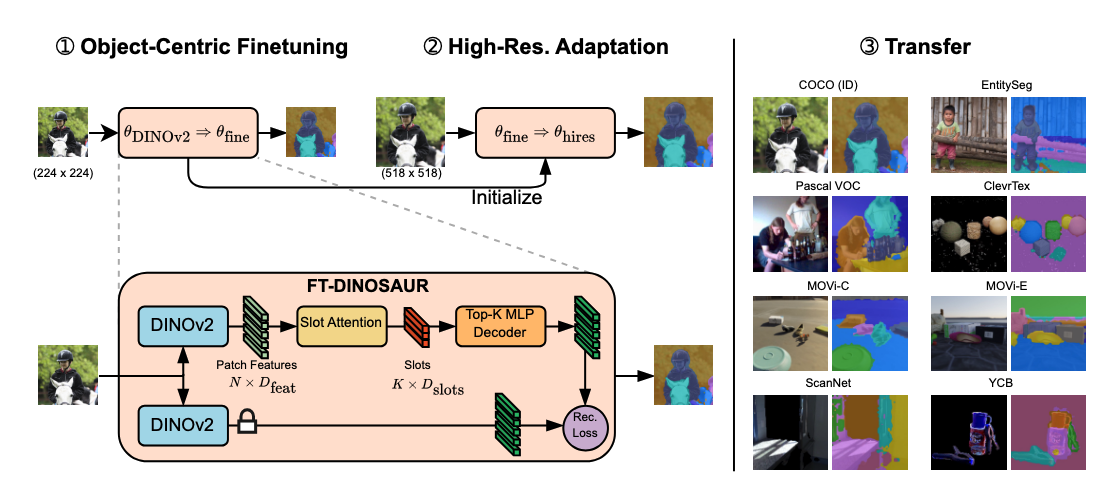
Anna Manasyan, Maximilian Seitzer, Filip Radovic, Georg Martius, Andrii Zadaianchuk
IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025
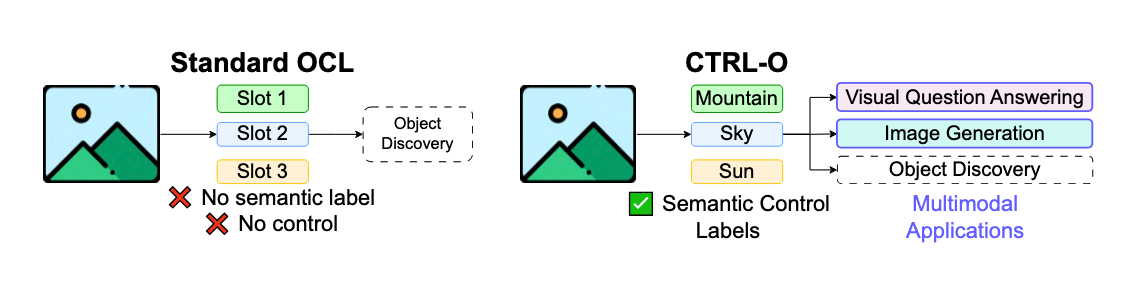
Aniket Didolkar*, Andrii Zadaianchuk*^, Rabiul Awal*, Maximilian Seitzer, Efstratios Gavves, Aishwarya Agrawal^
IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025
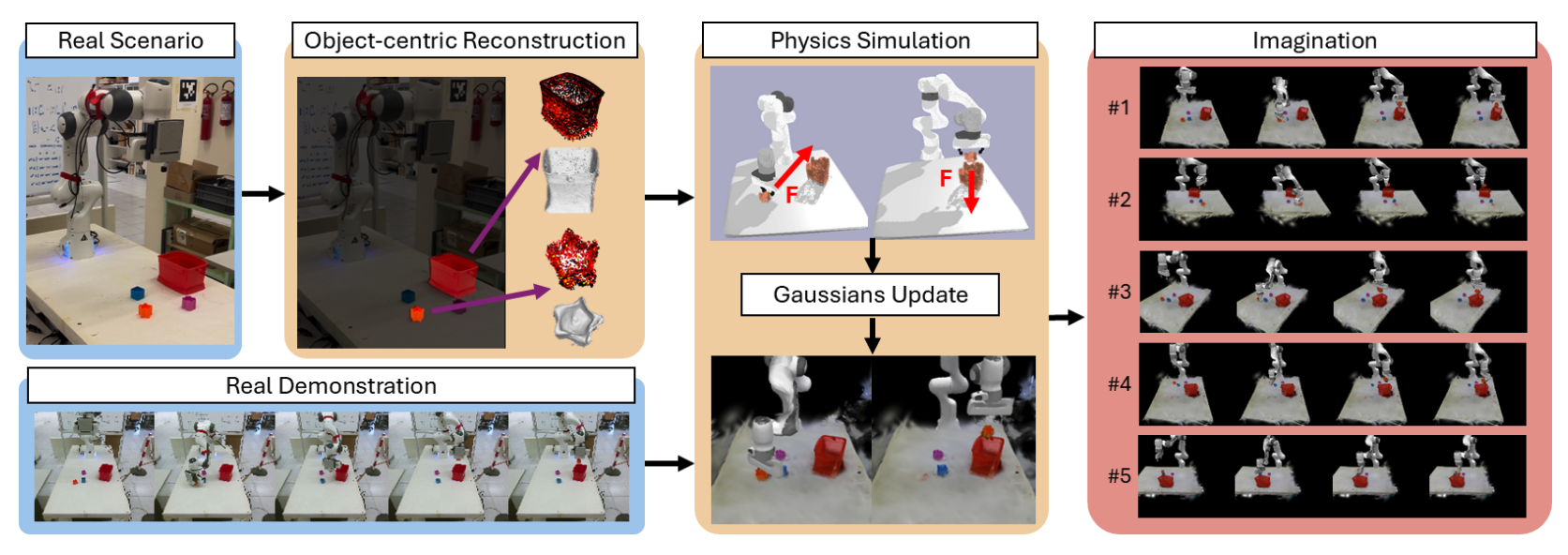
Leonardo Barcellona, Andrii Zadaianchuk, Davide Allegro, Samuele Papa, Stefano Ghidoni, Efstratios Gavves
International Conference on Learning Representations, 2025
Aniket Rajiv Didolkar*, Andrii Zadaianchuk, Anirudh Goyal, Michael Curtis Mozer, Yoshua Bengio, Georg Martius, Maximilian Seitzer*
International Conference on Learning Representations, 2025
Andrii Zadaianchuk*, Maximilian Seitzer*, Georg Martius
Conference on Neural Information Processing Systems, 2023
Andrii Zadaianchuk, Matthäus Kleindessner, Yi Zhu, Francesco Locatello, Thomas Brox
International Conference on Learning Representations, 2023 (Spotlight Presentation)
Maximilian Seitzer, Max Horn, Andrii Zadaianchuk, Dominik Zietlow, Tianjun Xiao, Carl-Johann Simon-Gabriel, Tong He, Zheng Zhang, Bernhard Schölkopf, Thomas Brox, Francesco Locatello
International Conference on Learning Representations, 2023
Andrii Zadaianchuk, Georg Martius, Fanny Yang
Conference on Robot Learning, 2021
Andrii Zadaianchuk*, Maximilian Seitzer*, Georg Martius
International Conference on Learning Representations, 2021 (Spotlight Presentation)
Andrii Zadaianchuk, Georg Martius
ICML Object-Oriented Learning Workshop, 2020
Diego Alejandro Agudelo-España, Andrii Zadaianchuk, et al.
International Conference on Robotics and Automation, 2020